
Process Scheduling

스케쥴링의 단위는 Thread가 맞다.
옛날에는 프로세스 단위로 생각했고, 지금도 교과서에서는 프로세스 스케쥴링이라는 말을 쓰기도 한다.
"CPU 스케쥴링", "프로세스 스케쥴링", "스레드 스케쥴링" 세 용어가 혼용되어 사용.
Remind: CPU Scheduling : 어느 프로세스가 돌아갈 것이냐?
프로세스 스케쥴링은 왜 필요한가?
•
CPU Utilization을 최대화하기 위해.
•
프로세스들 사이의 fairness : 어느 프로세스는 계속 돌아가고, 어느 프로세스는 조금만 돌아간다면 불공평할 것이다.
CPU-I/O Burst Cycle
burst : 갑자기 막 증가하는 것
•
CPU Burst : CPU가 많이 사용되는 것
•
I/O Burst : I/O가 많이 사용되는 것
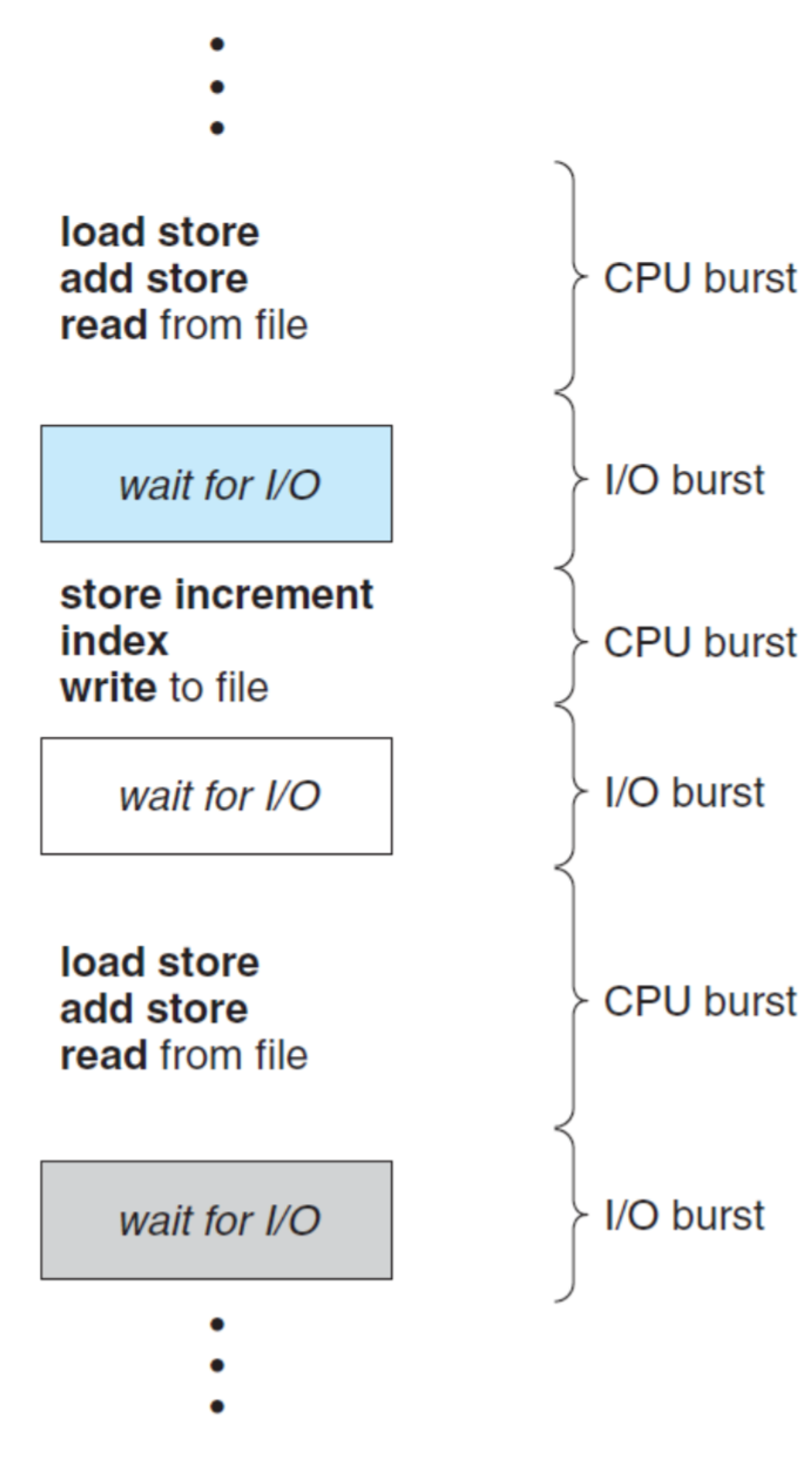
CPU 쓰다가, 'read from file' 호출하고 I/O 기다리다가, 다시 CPU 쓰다가, I/O 기다리다가, ...
모든 프로세스는 CPU Burst, I/O Burst 사이를 전환하면서 실행된다.
CPU Burst가 짧고 I/O Burst가 긴 프로그램도 있고, 그 반대인 프로그램도 있다.
CPU Burst duration
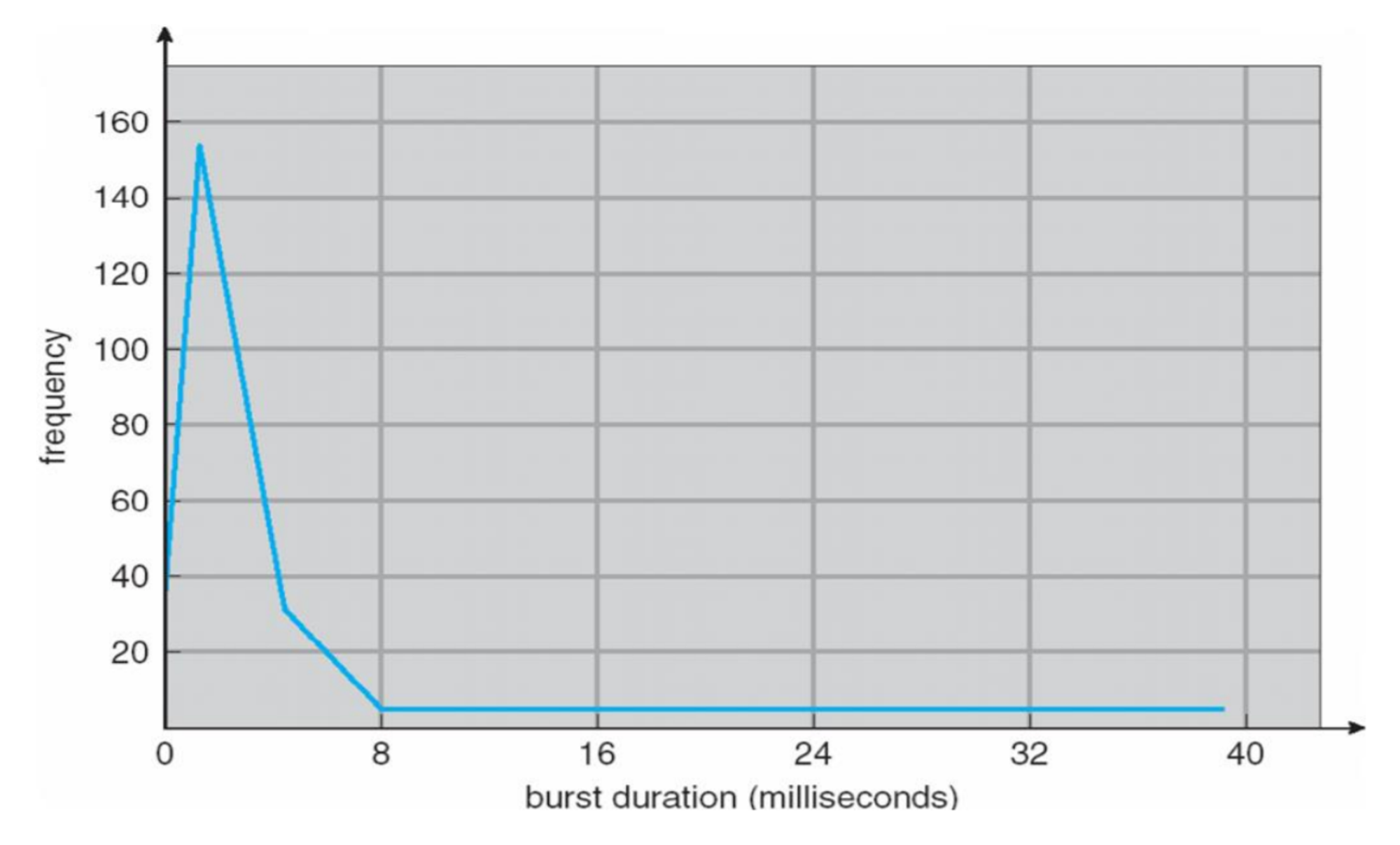
|—CPU—| |IO| |——CPU——| |IO| |—CPU—|
대충 이런 식으로 진행될 때, 모든 CPU Burst의 길이의 빈도를 측정해봤더니 위처럼 히스토그램이 그려지더라.
•
짧은 길이의 CPU Burst의 빈도가 아주 많았다.
•
긴 CPU Burst는 별로 없었다.
◦
→ 일반적인 프로그램은 CPU Burst 길이가 짧고, I/O에 대부분의 시간을 쓴다. I/O를 하지 않고 CPU만 계속 하는 프로그램은 거의 없다는 소리.
•
I/O bound 프로그램이라면 짧은 CPU Burst의 빈도가 더 많이 나올 것이다. (왼쪽 위로 치우침)
•
CPU bound 프로그램이라면 CPU에 대부분의 시간을 쓰니 긴 CPU Burst의 빈도가 더 많이 나올 것이다. (오른쪽 위로 치우침)
CPU Scheduler
Ready Queue에서 다음에 실행할 프로세스를 선택하는 것 → CPU 스케쥴러, 또는 Short-term scheduler가 한다.
Remind: Ready Queue : PCB의 Linked List.
링크드 리스트를 순회하면서 다음 실행할 프로세스를 선택한다.
스케쥴러가 결정을 내리는 경우 4가지
1.
프로세스가 Runnng → Waiting으로 바뀔 때 - I/O request 또는 wait()
→ 반드시 스케쥴링 결정을 해야 한다.
2.
프로세스가 Running → Ready로 바뀔 때 - (timer) interrupt
리눅스에서는 주기적으로 (1ms) timer가 돌아서, timer expired(timeout)된 애들은 다시 Ready Queue로 들어간다.
→ 스케쥴링 결정을 해도 되고 안 해도 된다. 다음에 계속 똑같은 프로세스 돌려도 되니까, 새 프로세스를 안 골라도 되는 것. (Policy에 따름)
3.
프로세스가 Waiting → Ready로 바뀔 때 - I/O 완료. 이제 User CPU를 쓸 때가 됐다는 것.
→ 스케쥴링 결정을 해도 되고 안 해도 된다. 새 프로세스가 Ready에 들어왔다고 해서, 무조건 새 프로세스를 골라야 한다는 건 아니다.
4.
프로세스가 Terminated된 경우
→ 반드시 스케쥴링 결정을 해야 한다. 프로세스가 종료되면 당연히 다음 실행할 프로세스를 정해줘야 한다.
Preemptive vs. Nonpreemptive
스케쥴러를 두 종류로 나눠볼 수 있다.
•
Nonpreemptive scheduler
◦
1번, 4번 경우에만 스케쥴링이 일어남.
◦
프로세스가 끝나거나 Wait queue로 들어갈 때만, 필요할 때만 스케쥴링이 일어남.
◦
스케쥴링을 강제하지 않음.
◦
프로세스가 자발적으로 CPU를 release하거나, terminate될 때까지 계속 돌아간다.
•
Preemptive scheduler
◦
모든 경우에 스케쥴링이 일어남.
◦
스케쥴링이 강제됨.
돌아가고 있는 프로세스를 Reschedule할 수 있는가?
•
Nonpreemptive : X
•
Preemptive : O
Preemptive scheduling
Preemptive : Forcing the process to give up the processor.
문제가 있다!
•
Race condition의 가능성.
◦
Race condition : 대충 두 개를 병렬 실행하는데 실행할때마다 결과가 다르게 나오는 것. → Ch6. Synchronization
◦
한 프로세스가 데이터를 업데이트하고 있는데 Preemption이 일어날 수 있다.
→ 다른 프로세스는 일관성 없는 데이터를 읽게 된다.
Data consistency가 깨질 수 있다.
•
커널 디자인의 문제
◦
프로세스가 커널 모드에서 시스템 콜을 처리하고 있는데, Preemption이 일어날 수 있다.
→ 마찬가지로 커널 자료구조가 inconsistent state에 빠진다.
◦
커널 영역은 Application보다 더 critical해서, 작은 값이라도 잘못되면 crash나기 쉽다. 더 큰 문제다.
▪
One solution : 시스템 콜 핸들링할 때는 Preemption을 잠시 Disallow.
→ Downside : Preemption을 Disallow하면 (당연히) 당장 시작해야 하는 프로세스가 시작 안 될 수도 있음.
Real-time computing 같이 계산이 바로바로 끝나야 하는 시스템에서는, 중요한 계산을 먼저 해야 할 수도 있는데...
Dispatcher
Dispatcher : 선택한 프로세스에게 CPU 컨트롤을 넘겨주는 일을 하는 Component.
Dispatch latency : 한 프로세스가 끝나고 다른 프로세스가 시작될 때까지의 시간.
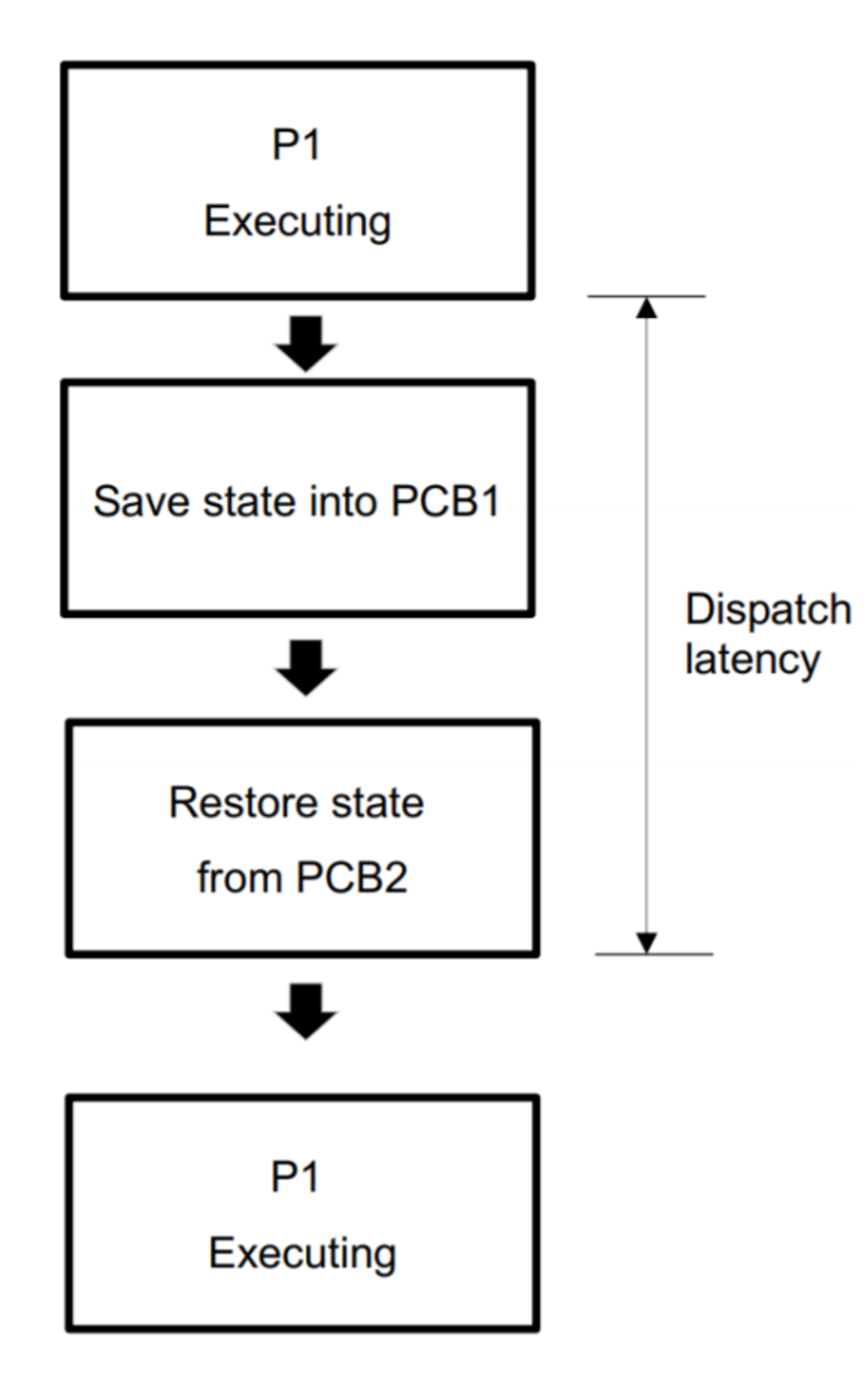
마지막에 P1 아니고 P2
디스패처의 책임
•
Context switch
•
User mode로의 switch
•
User program을 재시작할 때, 적절한 위치로 jumping.
Scheduling Criteria
스케쥴링 결정을 할 때, 무엇을 기준으로 삼을 수 있는가?
•
CPU utilization
◦
이상적으로는 CPU busy를 100%로 유지하고 싶지만, 이건 실제로는 문제가 있는 것.
▪
→ CPU saturation : CPU가 모든 걸 사용해서 더 이상 공간이 없는 것.
◦
실제로는 30~40% 정도가 최적. 이 정도로 유지한다.
•
Throughput
◦
단위 시간당 처리되는 일의 수를 최대화 → 짧은 것만 선택하면 되긴 된다.
•
Fairness
•
등등...
스케쥴링 알고리즘 네 가지
•
FCFS, SJF, SRF, RR
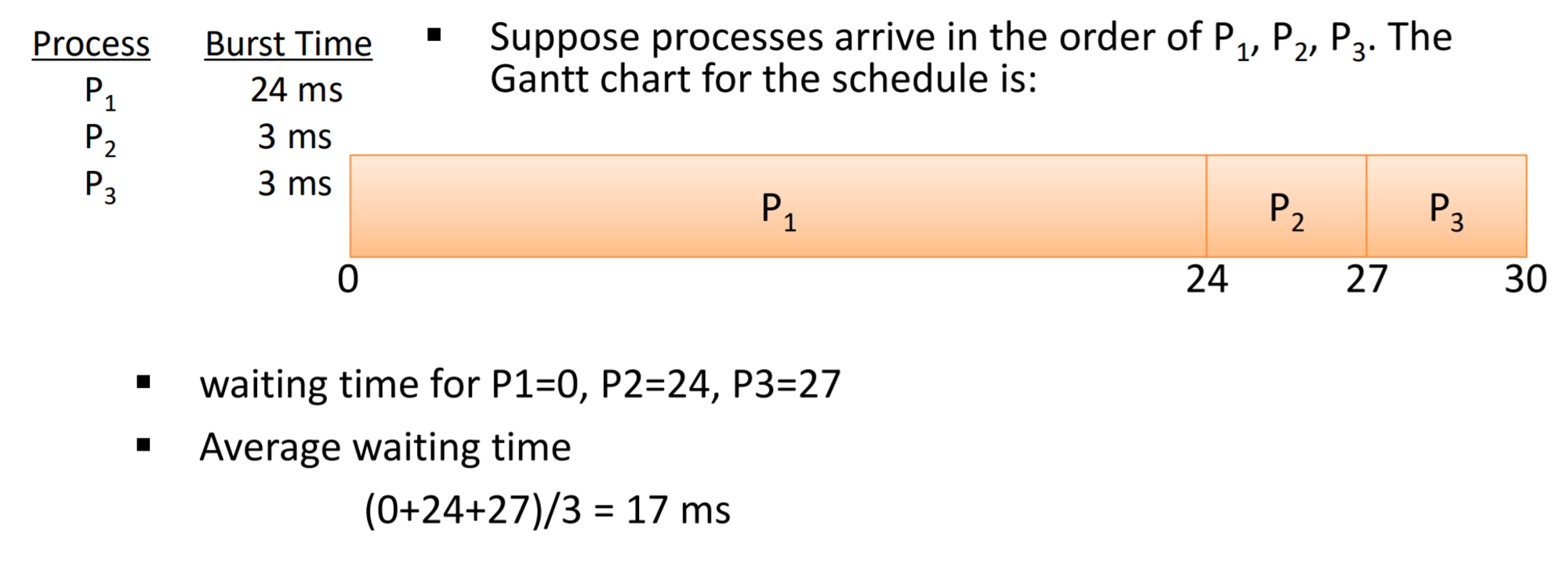
FCFS : First Come, First Served
•
먼저 들어온 프로세스를 먼저 할당
•
Nonpreemptive. 구현 쉬움.
•
평균 대기 시간(AWT)이 길다.
•
그런데 [P2, P3, P1] 순서대로 오면 평균 대기시간 = (0+3+6)/3 = 3ms 나온다.
◦
Convoy effect : Burst time이 큰 프로세스가 먼저 들어오면, 그 뒤에 들어온 프로세스들은 오래 기다려야 함.
SJF : Shortest-Job-First
•
짧은 거 먼저!
•
최적 AWT 나온다.
•
Preemptive일 수도, Nonpreemptive일 수도.
◦
Nonpreemptive인 경우.
▪
CPU burst 시간을 미리 알 수 없다. → 예측.
▪
Exponential Average
▪
= n번째 CPU burst 시간, = n번째 CPU burst 예측치.
▪
, 만 주어지면 구할 수 있다.
◦
Preemptive인 경우, SRF(Shortest Remaining Time First)라고 부른다.
▪
수행되던 도중, 남은 수행 시간이 더 작은 애가 있으면 걔 먼저 수행.
•
남은 수행 시간 : Burst time에서 그 프로세스 수행된 시간 뺀 것. 아직 수행 안 된 애, 지금 들어온 애들은 그냥 Burst time 그대로이다.
•
1ms 단위로 그냥 끊어서, 남은 시간 체크하면서 보자.
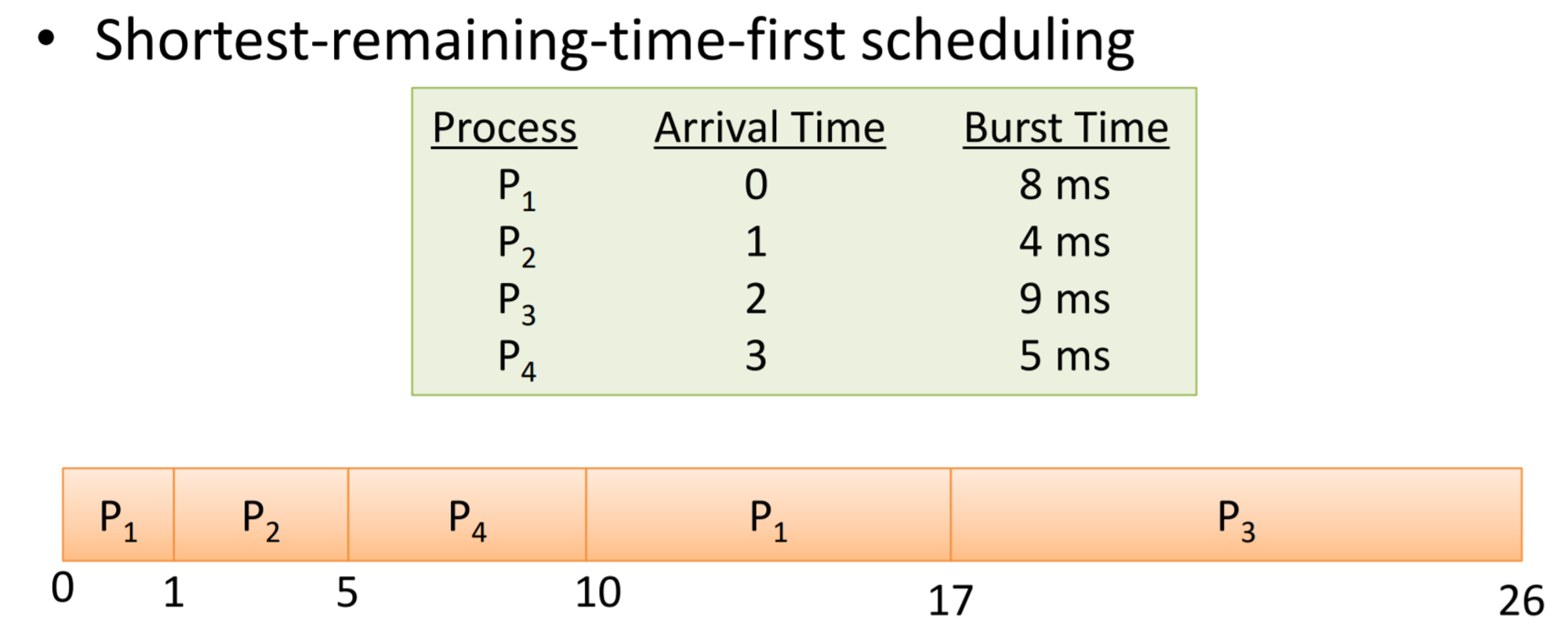
▪
Average waiting time = [(10-1)+(1-1)+(17-2)+(5-3)]/4 = 6.5 ms
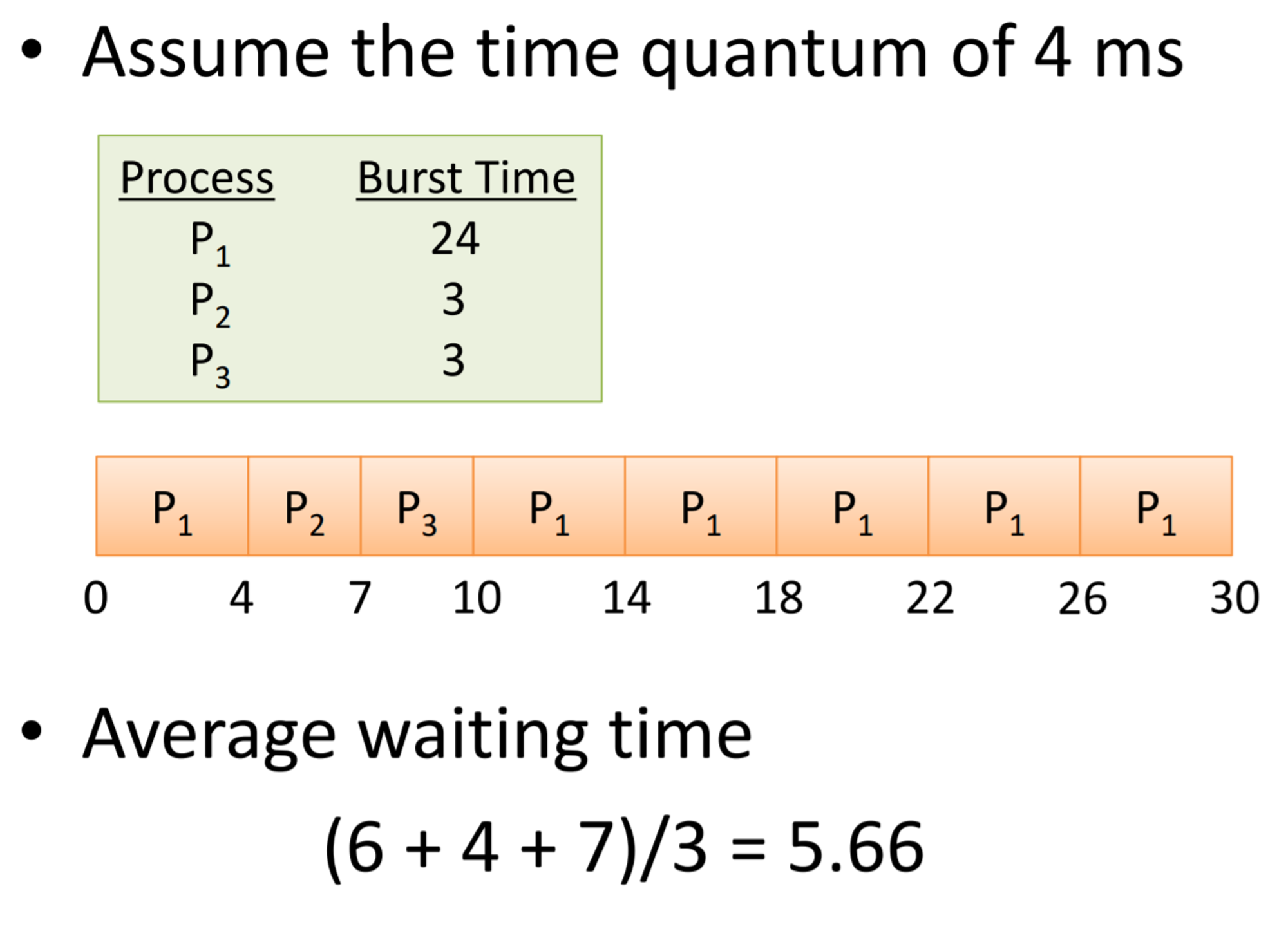
RR
프로세스를 Time quantum만큼 잘라서, FCFS처럼 돌린다. → Preemptive.
•
Ready queue 맨 앞에서 하나 골라서, Time quantum만큼 돌리고 (일찍 끝났으면 걍 끝내버리고), 남았으면 큐 맨 뒤에 넣는다.
•
이를 반복.
•
Time quantum은 어떻게 잡아야 하는가?
◦
너무 크면, FCFS랑 똑같다.
◦
너무 작으면, Context switch 오버헤드가 커진다.
◦
보통 Time quantum >> Context switch time이어야 하고,
Time quantum = 10ms, Context switch time = 10us 정도.
Priority Scheduling
프로세스에 우선순위를 매겨서, 큰 순서대로 스케쥴링.
SJF도 Priority Scheduling의 일종.
여기서 우선순위는 Burst time의 역수. (Burst time이 작을수록 우선순위가 크다.)
FCFS도 Priority Scheduling의 일종.
프로세스의 우선순위가 모두 동일.
Priority에는 두 종류가 있다.
•
Internally defined : 측정 가능한 양 (time limits, open file 개수, ...)
•
Externally defined : OS 외부에서 정한 기준 (돈을 얼마나 썼는지, ...)
Preemptive, Nonpreemptive 둘 다 가능하다.
•
Preemptive이면, 우선순위가 더 높으면 현재 프로세스 밀어내기.
•
Nonpreemptive이면, 바로 다음 순서에.
Starvation Problem (=indefinite blocking)
Priority Scheduling의 문제.
•
낮은 우선순위의 프로세스들은 실행되지 않을 수도 있다. 얼마나 기다려야 하는지 보장도 없다.
◦
→ Aging : Ready queue에 오래 있을수록 프로세스의 우선순위를 높여주자.
◦
Waiting time에 bound를 두는 것.
Multilevel Queue Scheduling
프로세스들을 여러 종류로 나눠서, 종류마다 나눈 Ready queue에 각각 다른 알고리즘 적용. RR, FCFS 등등...
그러나, 문제점.
•
한번 큐에 들어가면, 다른 큐로 이동하는 게 어려움. 유연하지 않음. 판단이 잘못되면 변경하기 쉽지 않음.
•
→ MFQS(Multilevel Feedback Queue Scheduling)
◦
맨 처음에는 가장 우선순위가 높은 큐로 들어가는데, Time quantum이 작음. 거기서 끝나지 못하고 Preempted되면, Time quantum이 두 배인 그 다음 큐로 이동. 거기서도 완전히 못 끝나고 Preempted 되면, 맨 마지막 큐인 FCFS 큐로 이동.
◦
얘도 문제점 : Starvation. 우선순위 높은 애만 줄창 들어오면... → Aging.